定义:
当系统中某一或某些参量变化时,特征方程的根在s平面上的运动轨迹称为根轨迹。
即极点随着参量变化时运动产生的轨迹。
分类:
- 常规根轨迹:
变化参数为开环增益K,且其变化取值范围为0到∞
- 广义根轨迹:
系统中其它任意一变化参数(开环增益除外)形成根轨迹
广义根轨迹期末不考
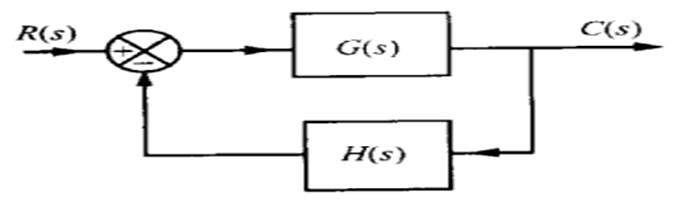
本章以上图为基础进行分析。
开环传递函数:G(s)H(s)
闭环传递函数:\frac{G(s)}
那么利用特征多项式等于0构造特征方程:
D(s)=1+G(s)H(s)=0
即
G(s)H(s)=Kg∏i=1n(s−pi)∏j=1m(s−zj)=−1
(设开环传递函数有m个零点 n个极点(n>m))
那么上式分解成幅值条件和相角条件:
- 幅值条件
幅值条件 K g ∏i=1n∣s−pi∣∏j=1m∣s−zj∣=1
幅值条件不但与开环零、极点有关,还与开环根轨迹增益有关;幅值条件是闭环极点的必要条件
- 相角条件
j=1∑m∠(s−zj)−i=1∑n∠(s−pi)=±(2k+1)π
相角条件只与开环零、极点有关;相角条件是闭环极点的充要条件
理论上来说,可以通过计算复平面中任意一个角相对于所有开环零极点的角度来判断根和根轨迹,但实际上非常困难,所以通过下面一系列法则直接画出。
根轨迹起始于开环极点,终止于开环零点(或无穷远处的“无穷零点”)
原因:
由幅值条件幅值条件 K g ∏i=1n∣s−pi∣∏j=1m∣s−zj∣=1
Kg=0Kg=∞s值必须趋近于某个开环极点s值必须趋近于某个开环零点→根轨迹终止于开环零点。
n阶系统,根轨迹有n个起始点→系统根轨迹有n个分支
原因:n阶系统即系统有n个极点,每个极点都是根轨迹的起点所以必然有n个分支
根轨迹是连续曲线,且对称于实轴
原因:
连续性:根是K的连续函数
对称性:特征方程的解都是实数解或共轭复数解
如果实轴上某一区段右边的实数开环零点、极点个数之和为奇数,则该区段实轴必是根轨迹;反之是偶数的话就必不是根轨迹。
原因:
开环零极点对实轴上的点贡献的角度是对称的,每对共轭复数极点所提供的幅角之和为360°,点右边所有位于实轴上的每一个极点或零点所提供的幅角为180°,左边所有位于实轴上的每一个极点或零点所提供的幅角为0°。
当系统n>m时,有(n-m)条根轨迹分支终止于无限远零点,也就是发散于无穷远处,此时只能用渐近线和分离点来描述轨迹。
渐近线与实轴的倾角:
ϕa=n−m±(2k+1)180∘
渐近线与实轴的交点坐标值:
σa=n−m∑i=1npi−∑j=1mzj
根轨迹分离点的坐标:
通过极值点求解:
dsdKg=0
或通过分式方程求解:
j=1∑mσb-zj1=i=1∑nσb-pi1
分离点处的汇合角:
ϕb=l±(2k+1)π
要求知识点:
根轨迹概念;常规根轨迹和广义根轨迹;
幅值条件和相角条件;
根轨迹实轴规则;
渐进线倾角和交点;
分离点两种计算方法;
根轨迹和虚轴交点:劳斯判据和代数法的使用过程;
根之和(次高次方的负系数)、根之积(-1的n次方*常数项);
广义根轨迹包含哪三类?
参数根轨迹的定义以及绘制思路;
正反馈回路的根轨迹为什么叫做零度根轨迹;
最小相位系统概念;存在延迟环节的系统是最小相位系统吗?
偶极子概念:如果系统中存在非常接近的零点和极点,其相互距离比其本身的模值小一个数量级以上,则把这对闭环零、极点称为偶极子。
作用:简化高阶系统,抵掉不利极点(极点的存在会增大系统的阻尼比);
附加开环零点作用:渐近线与实轴倾角增加,渐近线与实轴交点左移(更加稳定)