¶ 线性系统校正的概念
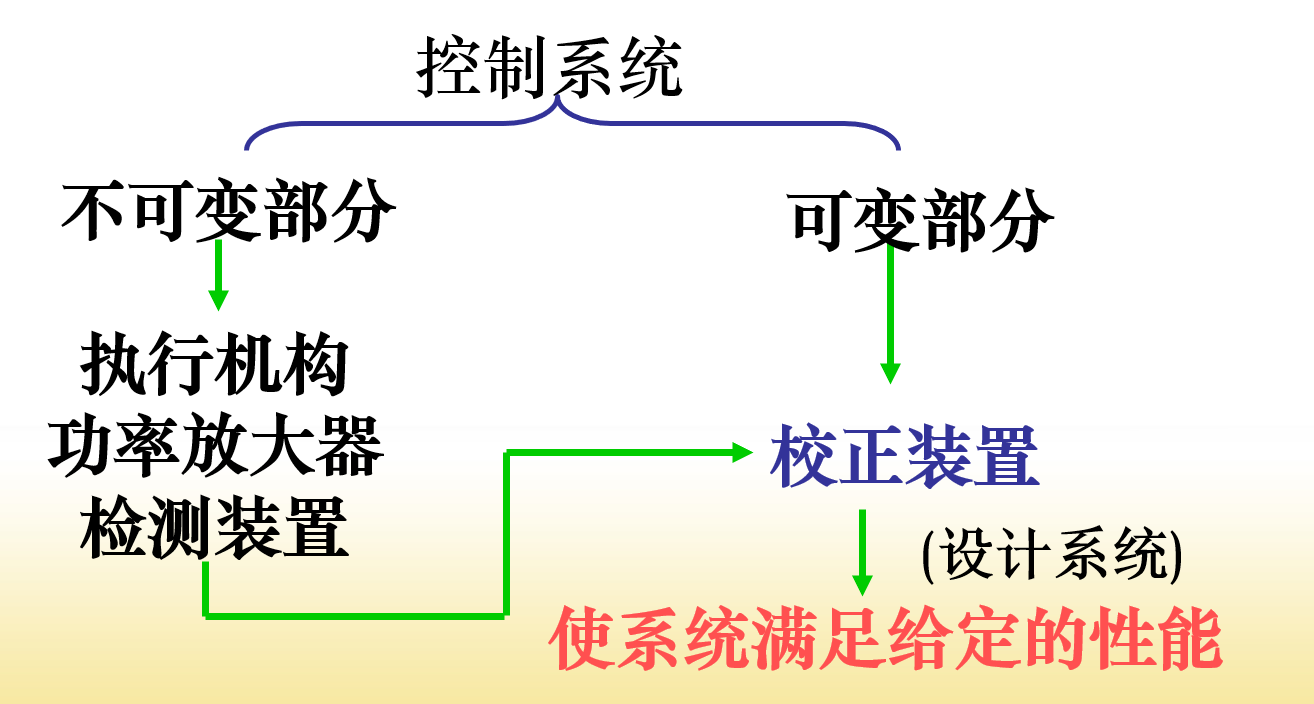
校正方式:
- 串联校正
- 设计较简单,容易对信号进行各种必要的变换,
- 但需注意负载效应的影响
- 并联校正
- 可消除系统原有部分参数对系统性能的影响
- 元件数也往往较少
- 复合校正
- 性能指标要求较高的系统
¶ 线性系统的基本控制规律
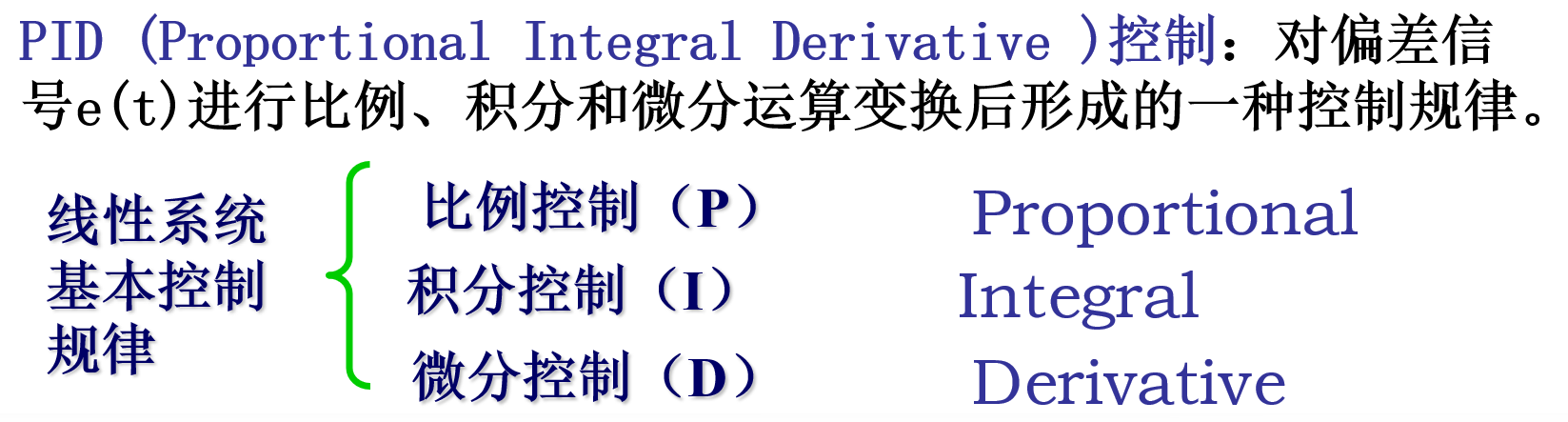
¶ 比例控制-P
G_c\left(s\right)=\frac{U\left(s\right)}{E\left(s\right)}=K_p$$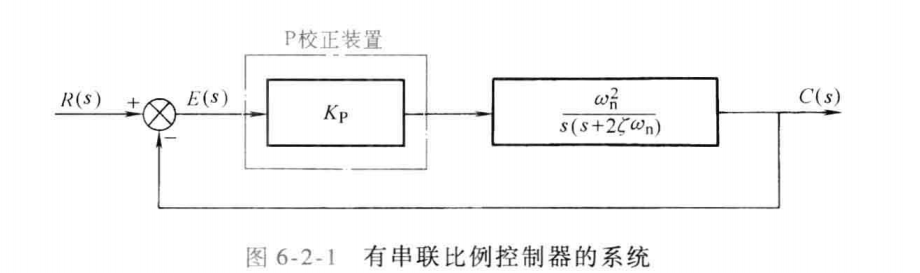
- Kp>1:开环增益加大,稳态误差减小;幅值穿越频率增大,过渡过程时间缩短;系统稳定程度变差
- Kp<1:相反
当原系统稳定裕量充分大时才采用比例控制
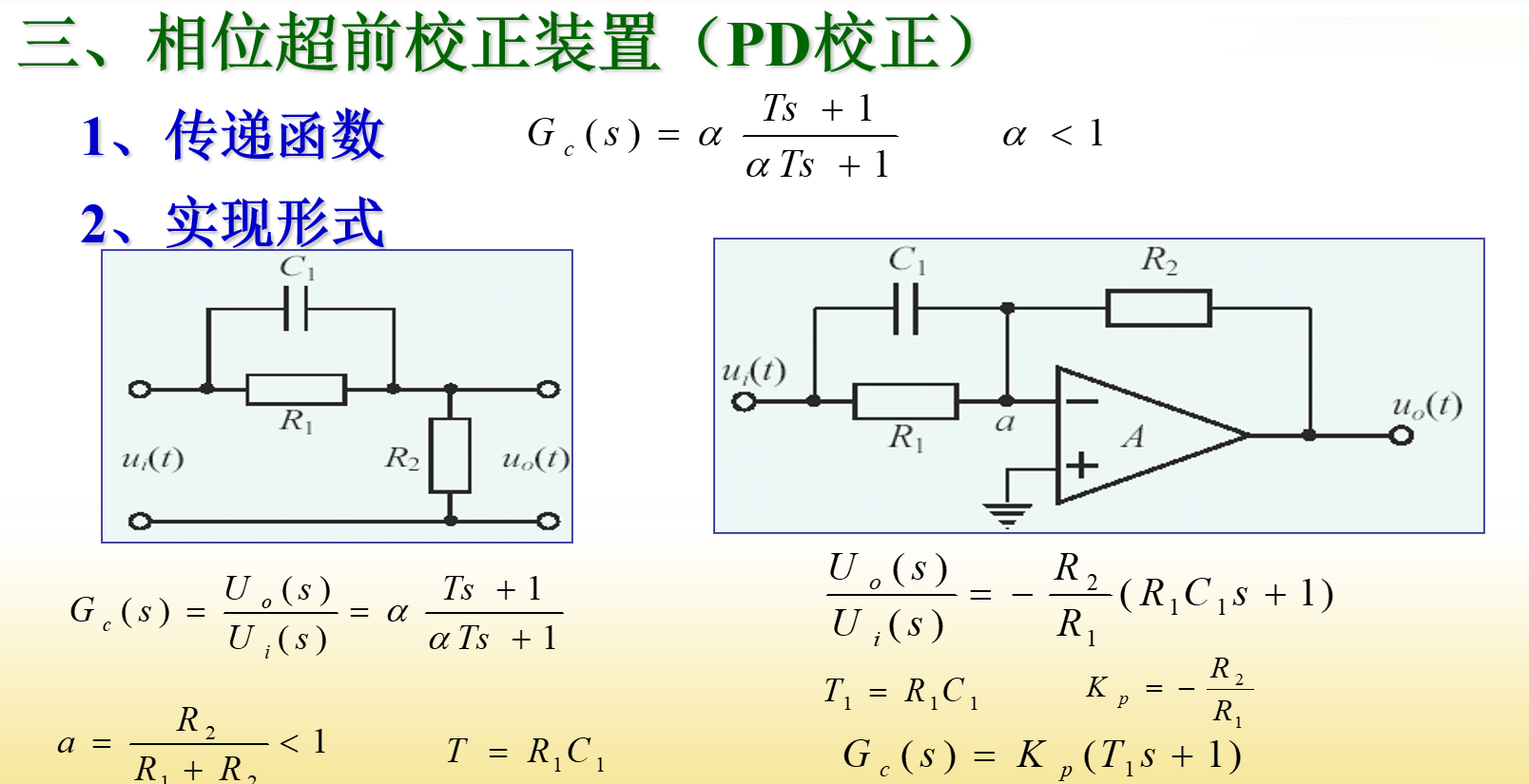
### 比例微分控制-PD
$$G_c(s)=\frac{U\left(s\right)}{E\left(s\right)}=K_p+K_ds$$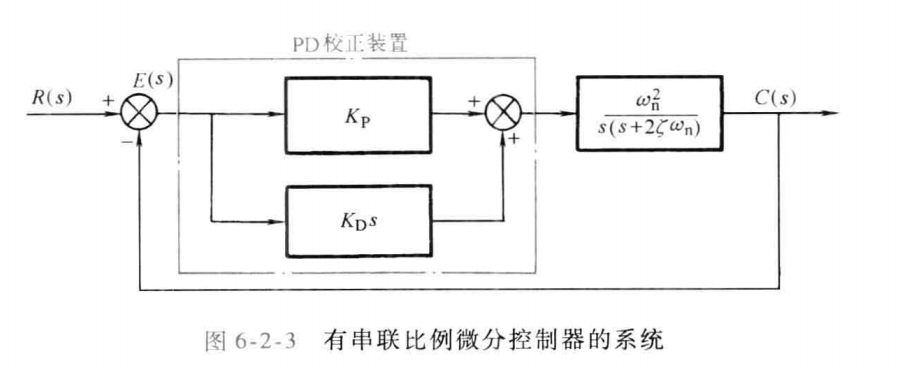
微分控制具有预测特性
- 相位裕量增加,稳定性提高;
- 高频段增益上升,降低了系统抗干扰的能力
### 比例积分控制-PI
$$G_{_{c}}(s)=\frac{U\left(s\right)}{E\left(s\right)}=K_{_{p}}+\frac{K_{_{p}}}{T_{_{i}}s}=\frac{K_{_{p}}T_{_{i}}s+K_{_{p}}}{T_{_{i}}s}$$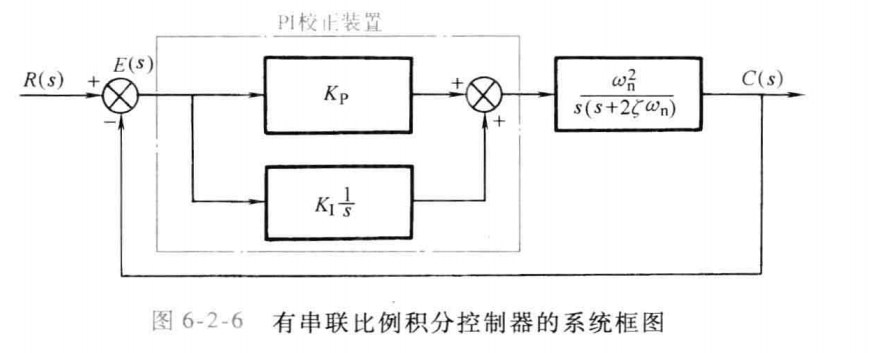积分控制的存在使PI控制器具有记忆功能。调节Ti 影响积分控制作用;调节Kp既影响比例部分又影响积分部分的作用
一个积分环节->提高系统型次->系统的稳态精度
系统的相位滞后增加;若要通过PI控制器改善系统的稳定性,必须有Kp< 1,以降低系统的幅值穿越频率
### PID控制
$$G_c(s)=\frac{U(s)}{E(s)}=K_p+\frac{1}{T_is}+T_ds=\frac{(\frac{1}{T_1}s+1)(\frac{1}{T_2}s+1)}{T_2s}$$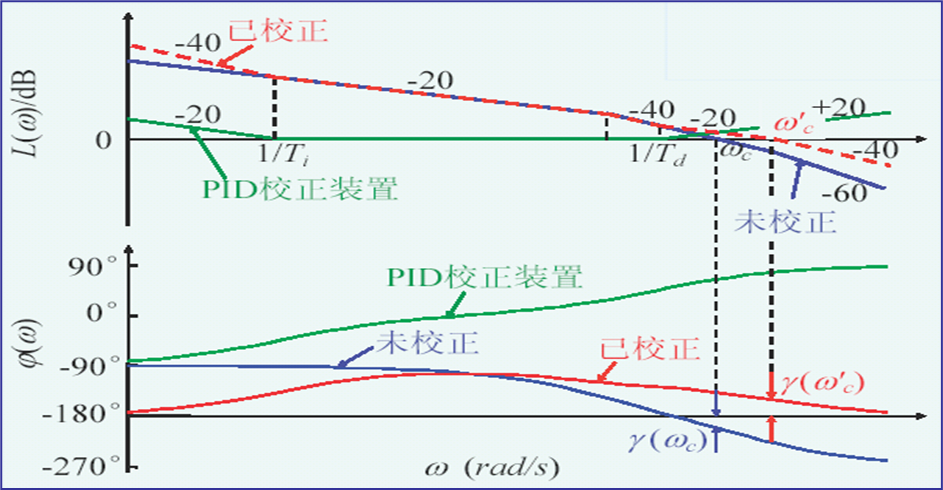
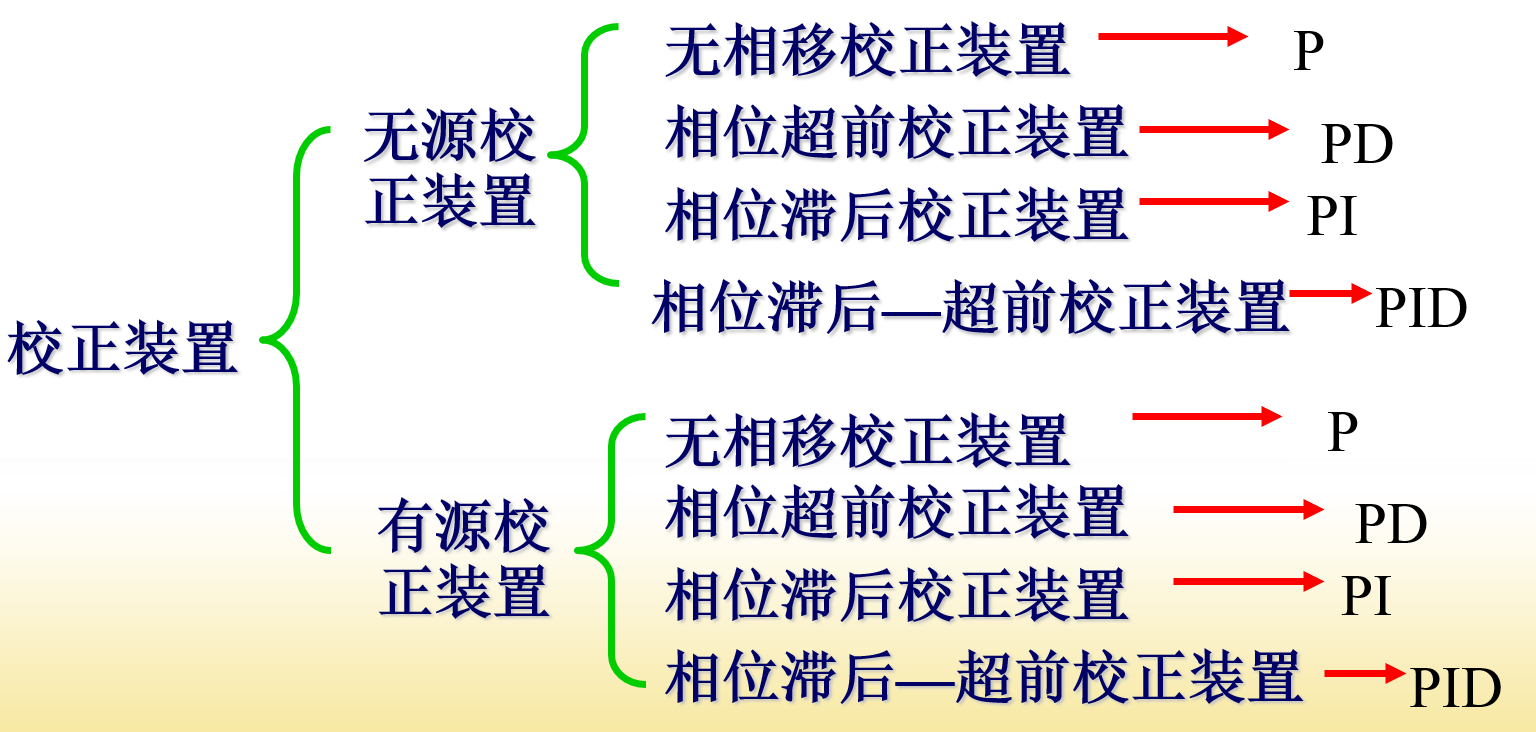
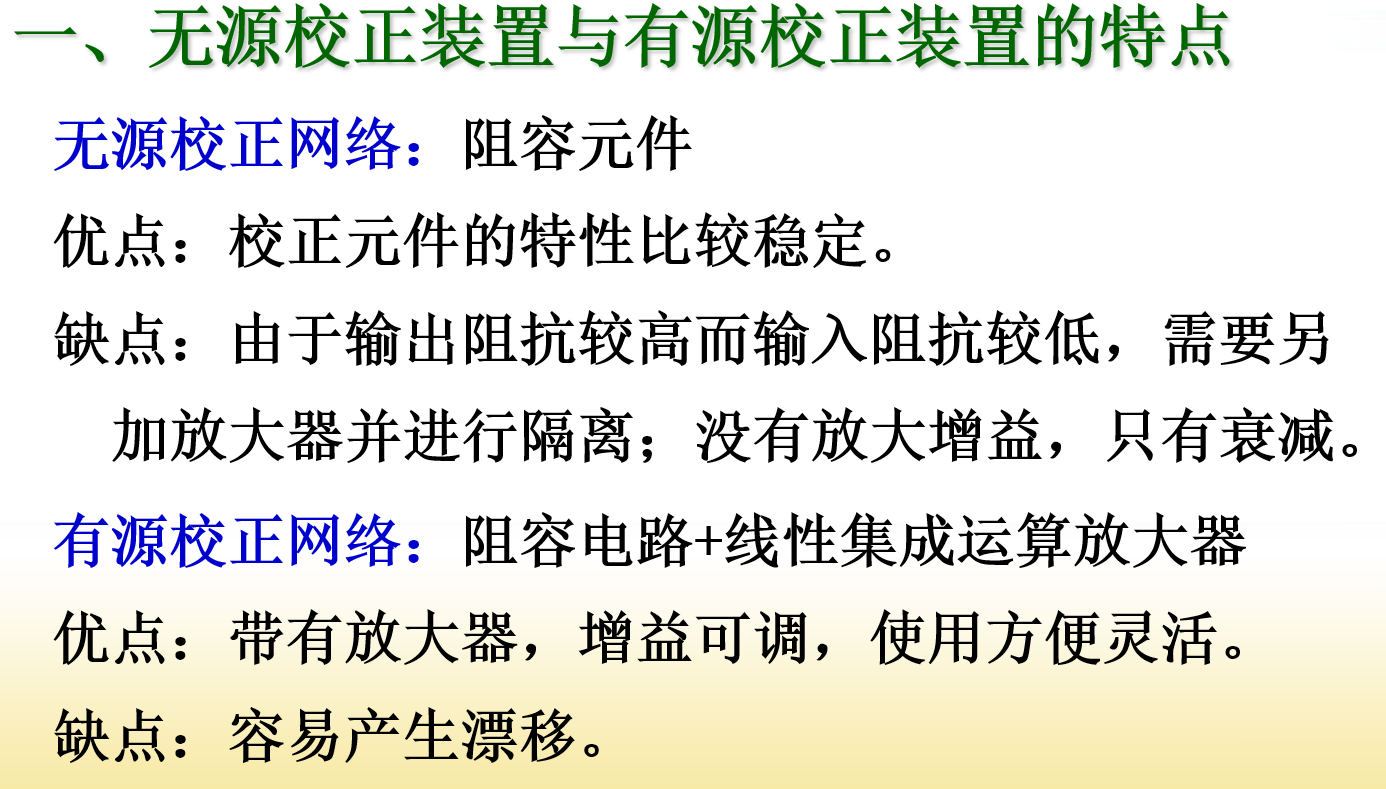
## 常用校正装置及特点
#### 超前校正
$$G_c(s)=\alpha^2\frac{Ts^2+1}{\alpha^2Ts^2+1}
α 太小,通过校正装置的信号幅值衰减太严重,一般取α>1/20
Bode图:
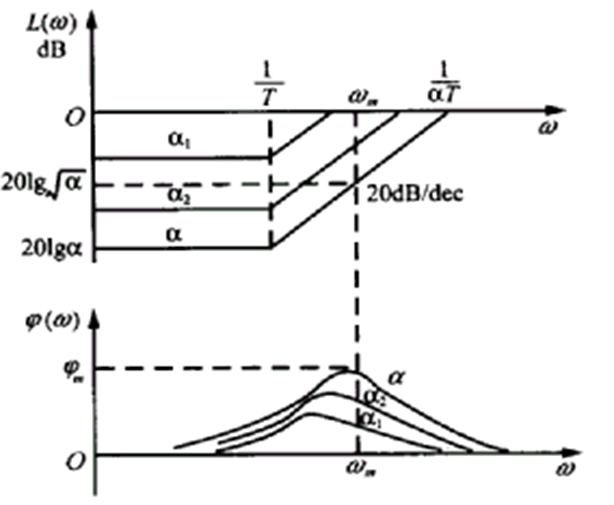
在整个频率范围内都产生相位超前
\varphi\left(\omega\right)=\arctan\quad T\omega-\arctan\quad\alpha T\omega$$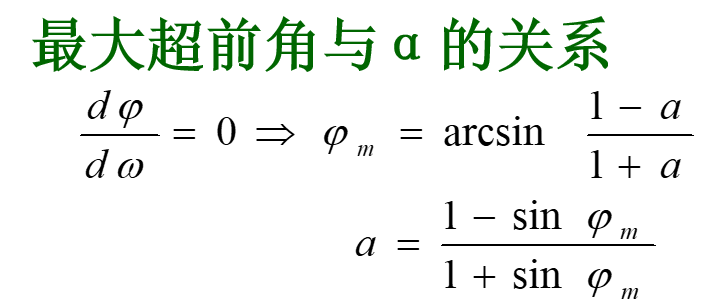
#### 滞后校正
$$G_c(s)=\frac{Ts^2+1}{\beta Ts^2+1}$$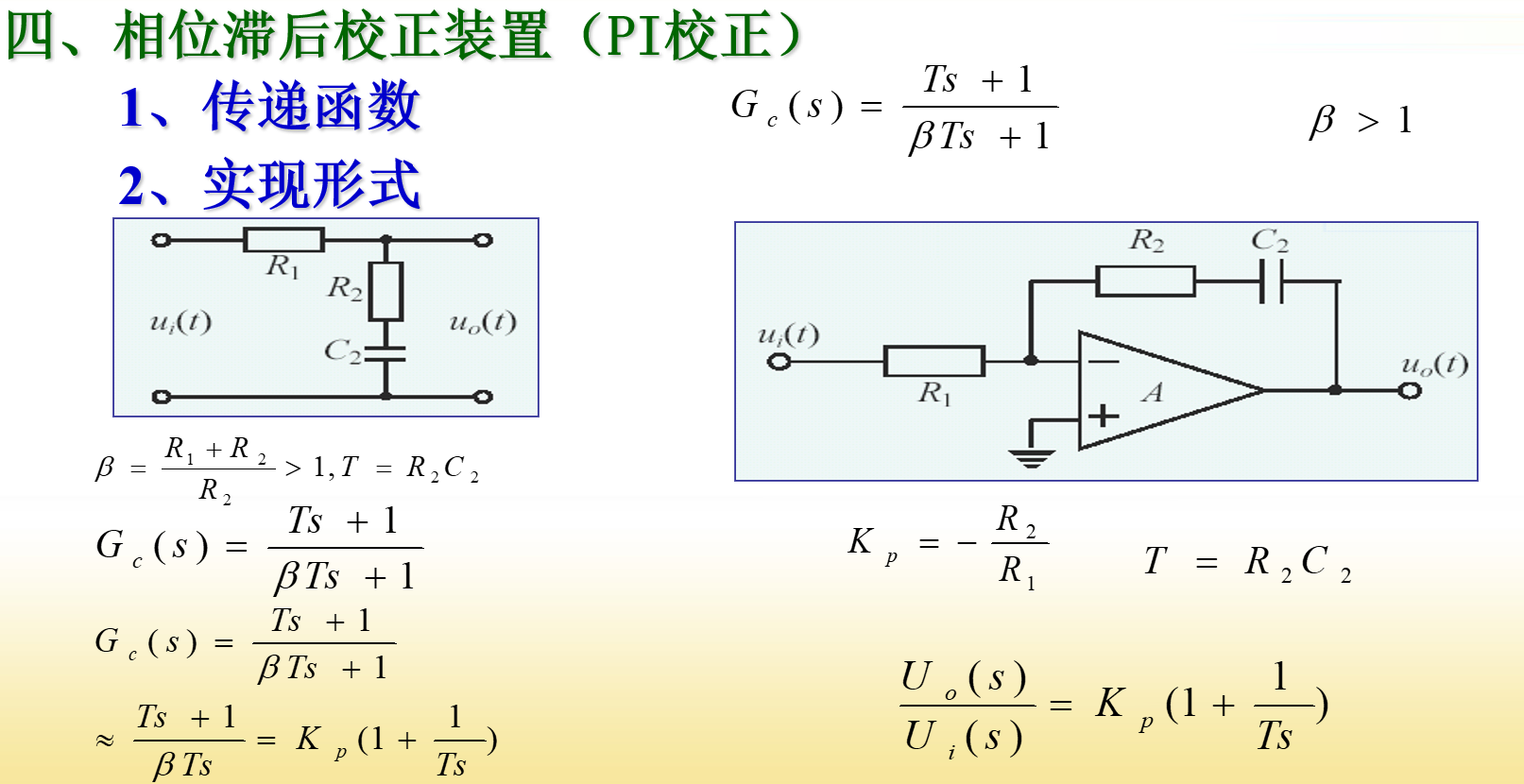
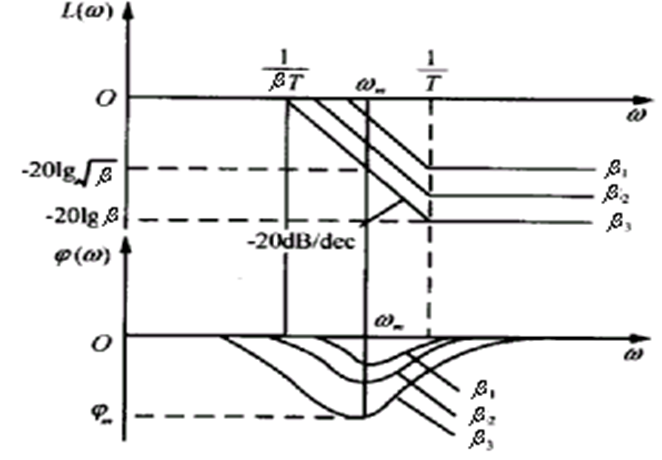
整个频率范围内相位都滞后
开环对数幅频特性的中高频部分⬇️->增益交界频率⬇️->稳定裕量⬆️

## 校正装置设计的方法和依据
### 设计方法
1. 根轨迹设计方法
1. 
2. 复杂
2. 频率特性设计方法
1. 
2. 简便、直观
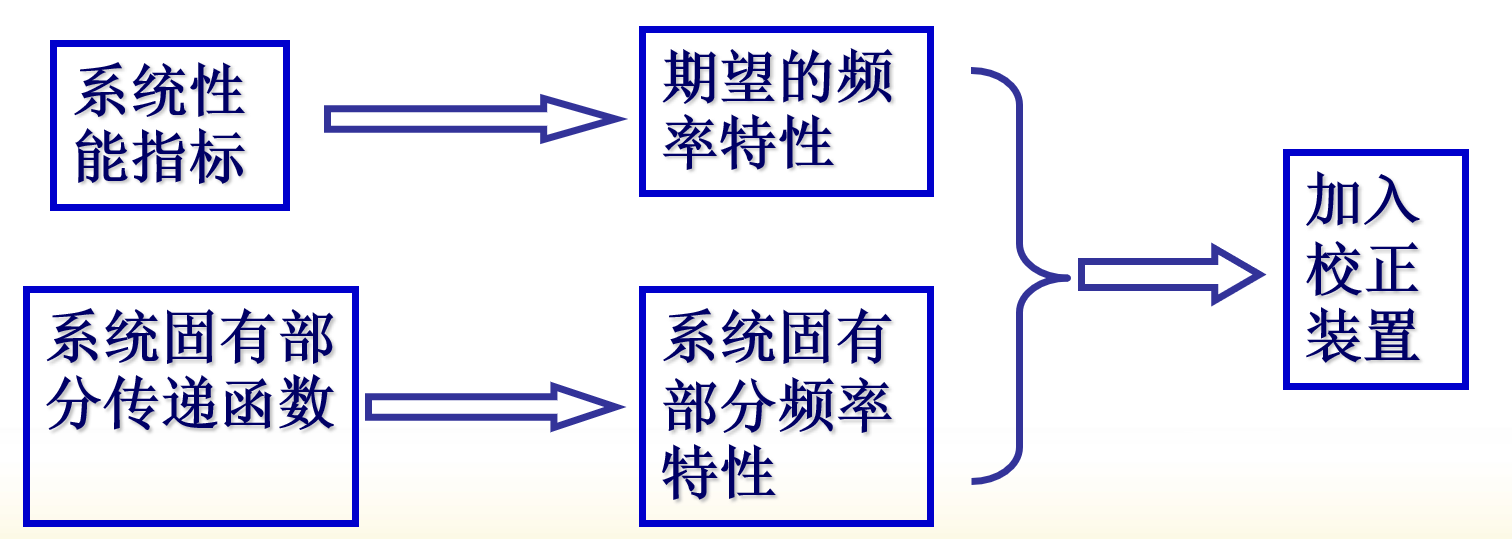
### 频率特性设计方法的步骤
1. 绘制固有部分的开环Bode图
2. 列出目标性能指标
3. 期望校正后的开环Bode图
4. 求出校正装置的Bode图
5. 求出校正装置的传递函数
6. 确定校正装置的形式和参数
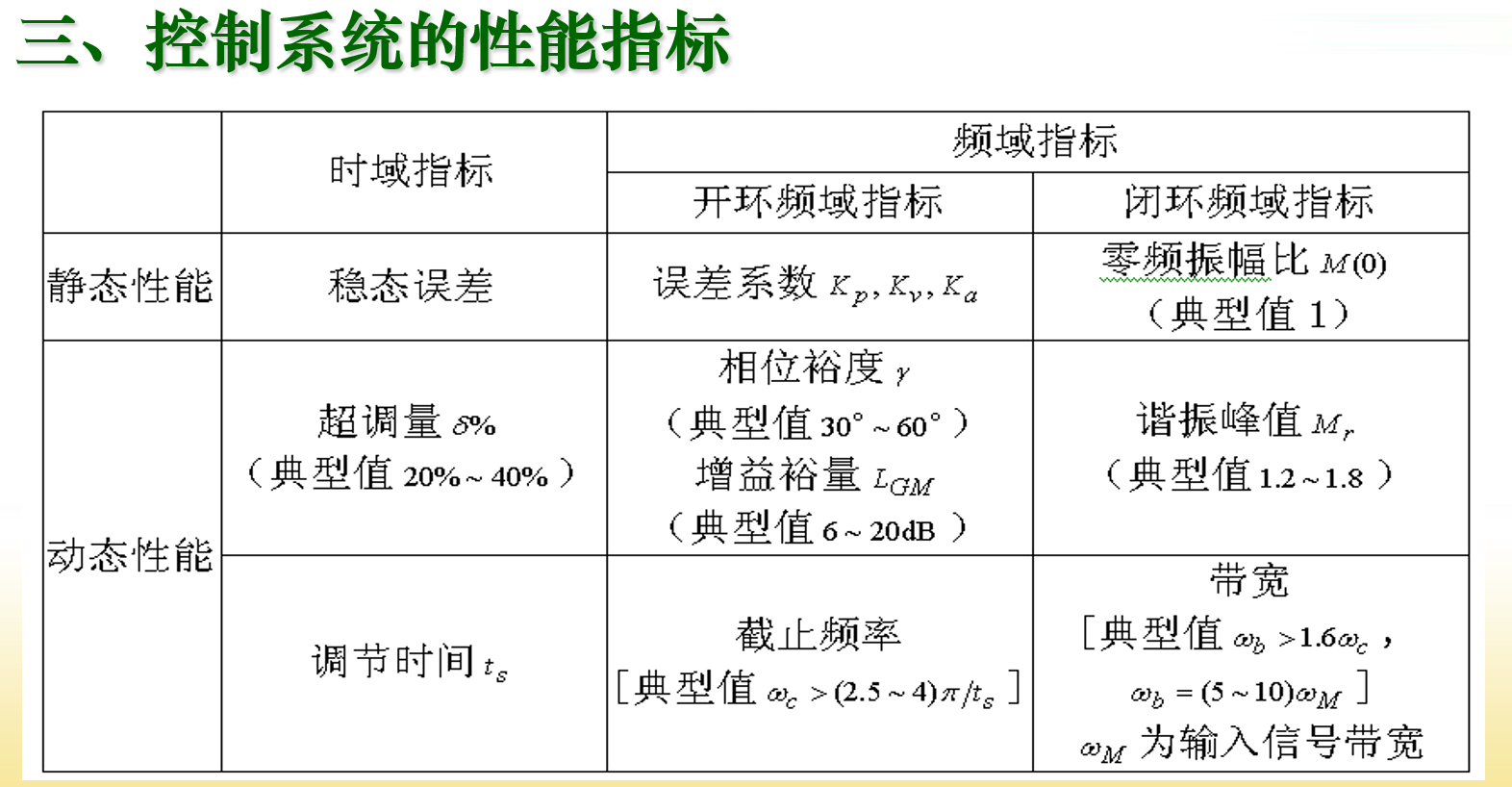
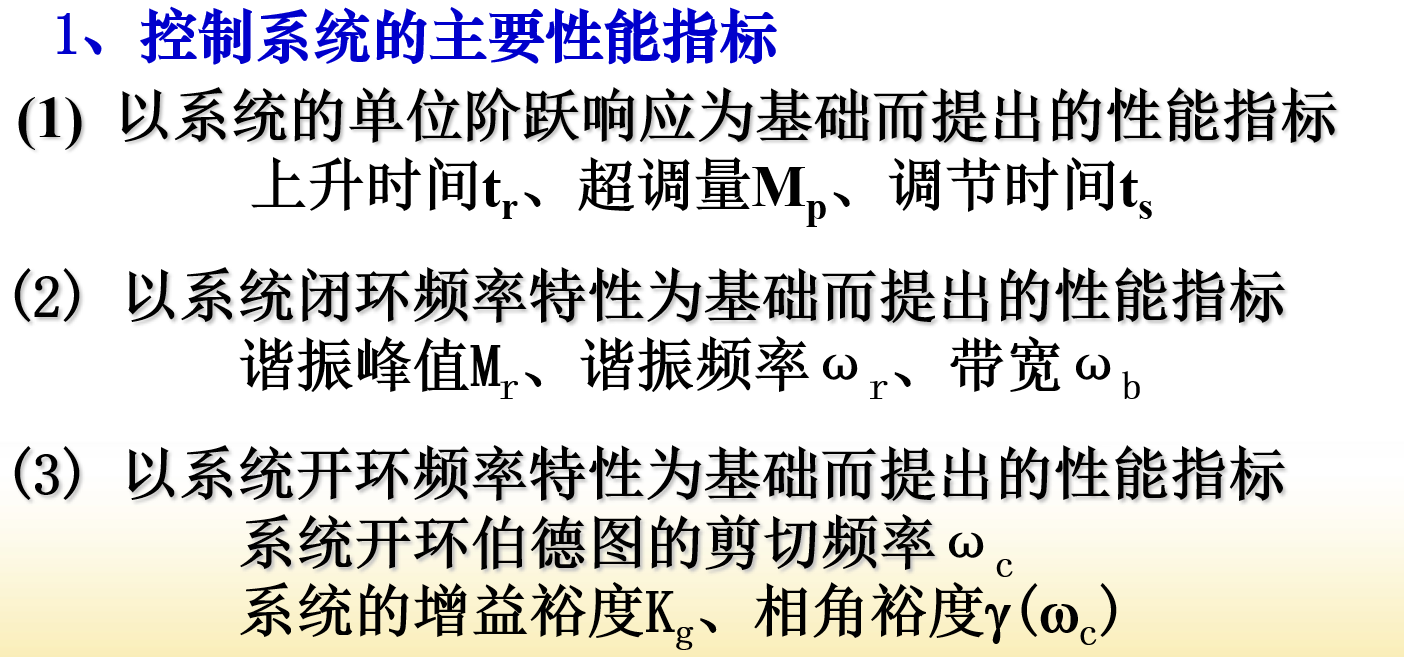
### 性能指标的确定
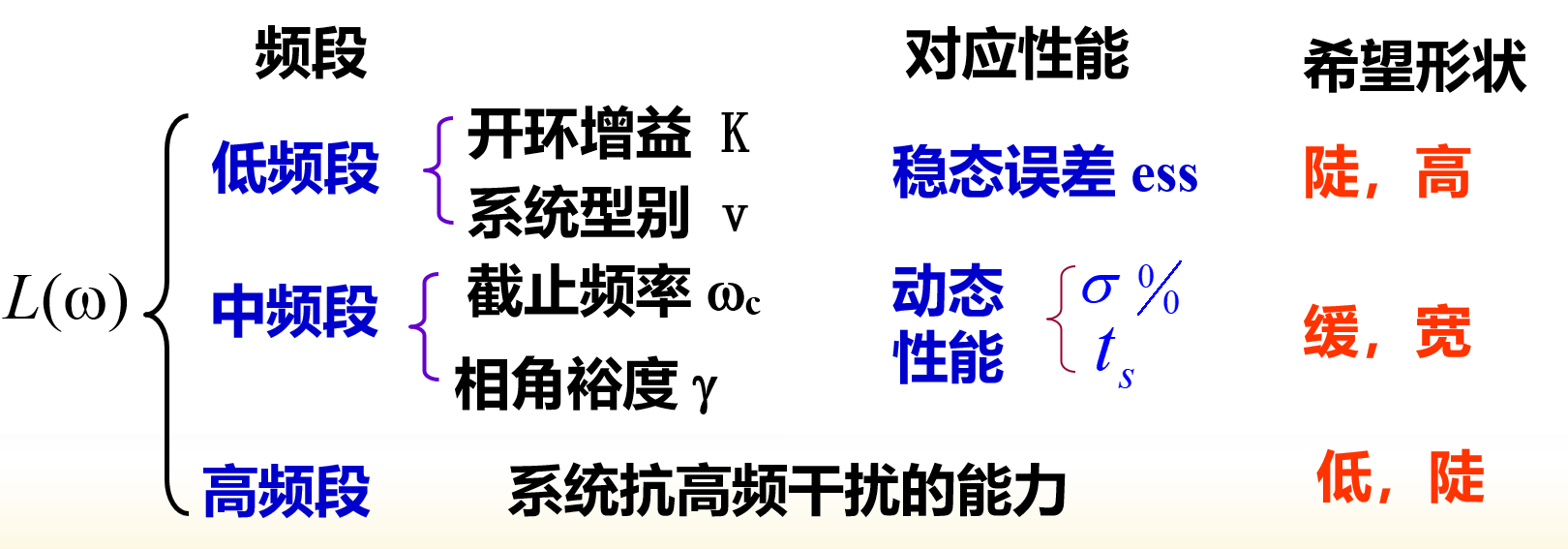
#### 三频段的划分
- 低频段 (第一个转折频率ω1之前的频段) ->稳态性能
- 中频段 (ω1 ~ 10ωc) ->动态性能
- 高频段 (10ωc 以后的频段) ->抗干扰
## 串联校正的设计
### 串联相位超前校正
步骤:
- 根据稳态性能指标确定系统的开环增益
- 绘制在确定K值下的开环伯德图,计算其相角裕度γ0
- 由要求的相角裕度γ,计算所需的超前相角
- $\varphi_{0}=\gamma-\gamma_{0}+\varepsilon,\varepsilon=5-20\degree$
- 计算校正网络系数
- $\varphi_{m}=\varphi_{0},\alpha=\frac{1-\sin\varphi_{m}}{1+\sin\varphi_{m}}$
- 确定校正后系统的剪切频率
- 未校正系统伯德图曲线上增益为10lg a的对应频率
- 确定校正装置的交接频率
- $\omega_{1}=\frac{1}{T}=\frac{\omega_{m}}{\sqrt{ a }},\omega_{2}=\frac{\alpha}{T}=\omega_{m}\sqrt{ a }$
- 画出校正后的伯德图,验算相角稳定裕度是否达到要求
- 验算其它性能指标,不满足要求重新设计
- 写出校正装置的传递函数
- 提出实现形式,并确定网络参数
不适合采用串联超前校正的系统:
- 要求提供的相角裕度太大
- 未校正系统相角在剪切频率急剧减小
### 串联相位滞后校正
作用:
- 提高系统低频响应的增益,减少稳态误差
- 使系统高频响应的增益衰减,提高系统的相角裕度,改善暂态性能
步骤:
- 根据稳态性能指标确定系统的开环增益
- 绘制在确定K值下的开环伯德图,计算其相角裕度γ0
- 求出伯德图上的相角裕度为γ2,对应频率
- $\gamma_{2}=\gamma+\varepsilon,\varepsilon=10-15 \degree,\gamma_{2}=180\degree+\varphi(\omega_{c_{2}})\to\omega_{c_{2}}$
- 计算校正网络系数
- $L(\omega_{c_{2}})20lg\beta \to \beta$
- 确定滞后校网络的交接频率
- $\omega_{1}=\frac{1}{\beta\tau}=\frac{\omega_{2}}{\beta},\omega_{2}=\frac{1}{\tau}=\frac{\omega_{c_{2}}}{2}--\frac{\omega_{c_{2}}}{10}$
- 画出校正后的伯德图,验算相角稳定裕度是否达到要求
- 验算其它性能指标,不满足要求重新设计
- 写出校正装置的传递函数
- 提出实现形式,并确定网络参数
## 反馈校正
反馈校正可以起到与串联校正同样的作用,且具有较好的抗噪能力。
- 串联校正设计比反馈校正设计简单,串联校正对校正环节元件特性的稳定性有较高的要求
- 反馈校正对校正环节元件特性的稳定性要求较低,减弱了元件特性变化对整个系统特性的影响
- 反馈校正常需由一些昂贵而庞大的部件所构成,对某些系统可能难以应用
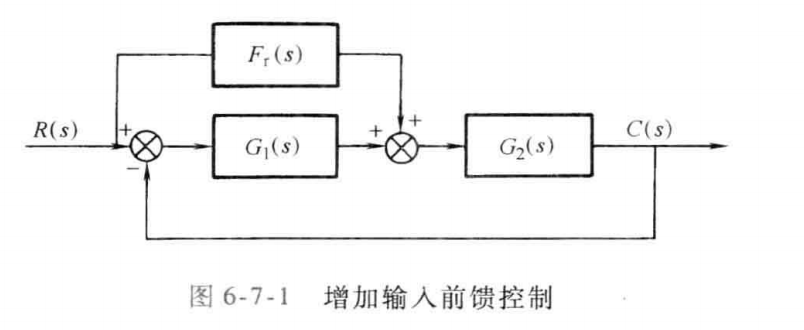
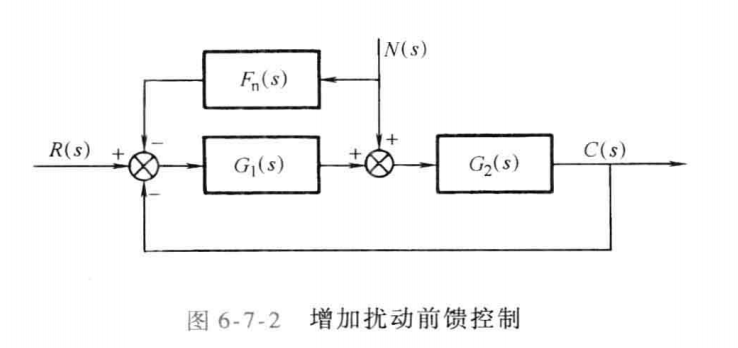
## 复合控制
通过在系统中引入输入或扰动作用的开环误差补偿通路(顺馈或前馈通路),与原来的反馈控制回路一起实现系统的高精度控制。
### 前馈控制
---
> 重点:
> 校正定义,开环频域指标,串联、并联、复合校正特点,P, PD, PI校正的特点;无源有源校正含义;
> 超前校正表达式及α取值情况,滞后校正表达式及β取值情况,α计算公式,ωm含义,ψm含义以及取值情况,低频、中频、高频划分原则。超前、滞后校正基本思想。
> 超前校正、滞后校正例题分析
> 反馈校正作用和特点;前馈校正作用和特点