¶ 基本概念
- 线性控制系统:由线性元件组成,输入输出间具有叠加性和均匀性性质
- 非线性控制系统:系统中至少有一个非线性元件,输入输出间不具有叠加性和均匀性性质
- 非本质非线性:能够用小偏差线性化方法进行线性化处理的非线性
- 本质非线性:用小偏差线性化方法不能解决的非线性
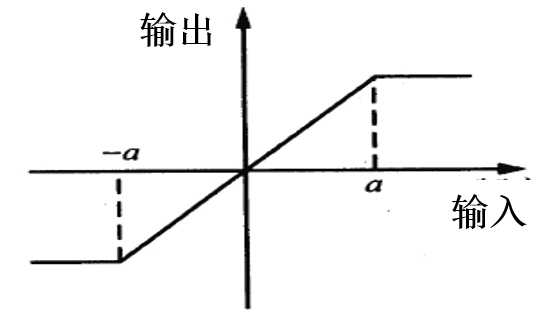
¶ 典型非线性特性
¶ 饱和特性
- 状态平面:横坐标为x1,纵坐标为x2
- 相平面:令的状态平面
- 当t连续变化时,将在相平面留下一条轨迹——相轨迹或相平面图
- 平衡点:对于所有的满足的点称为的平衡点
¶ 性质
¶ 相轨迹上每一个点都有确定的斜率
¶ 奇点
满足$$\frac{dx_2}{dx_1}=\frac{0}{0}$$为不定式的点称为奇点
¶ 相轨迹正交于x1轴
¶ 相轨迹的运动方向确定
相平面的上半平面相轨迹向右运动,相平面的下半平面相轨迹向左运动
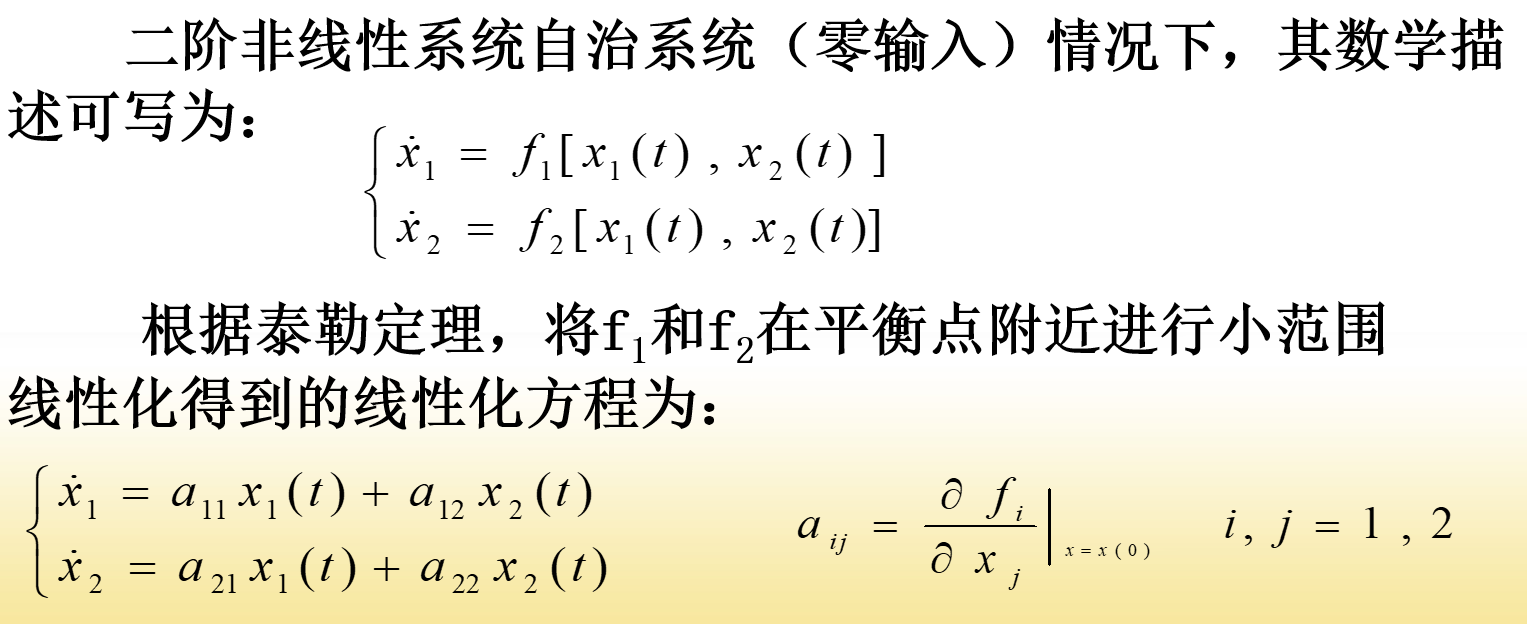
¶ 二阶线性系统相轨迹的特征
线性二阶系统的齐次微分方程:$$\ddot{x}2+2\zeta\omega_n\dot{x}2+\omega_n2x2=0$$
¶ 几种运动模式
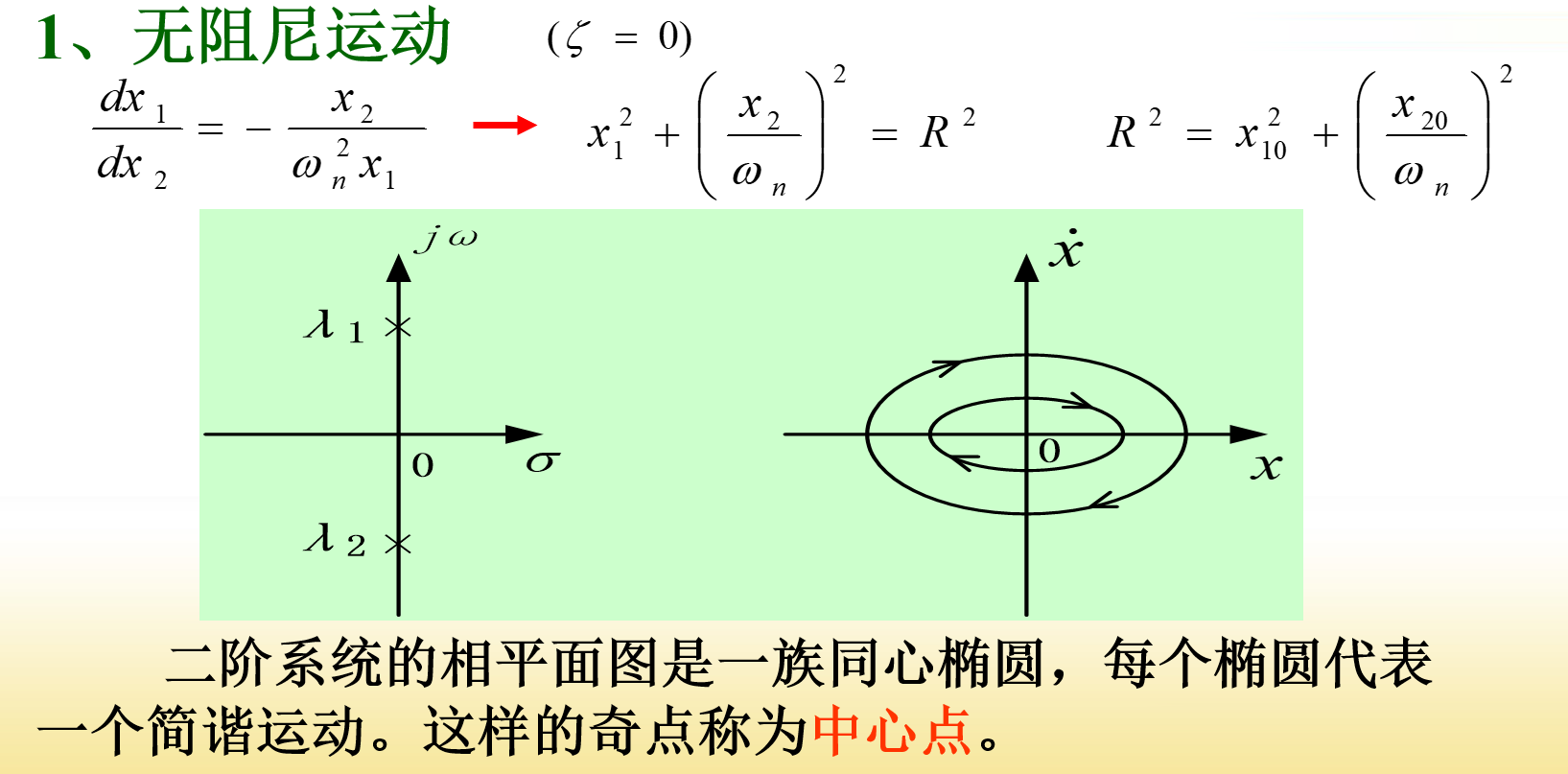
- 中心点-无阻尼运动、同心椭圆
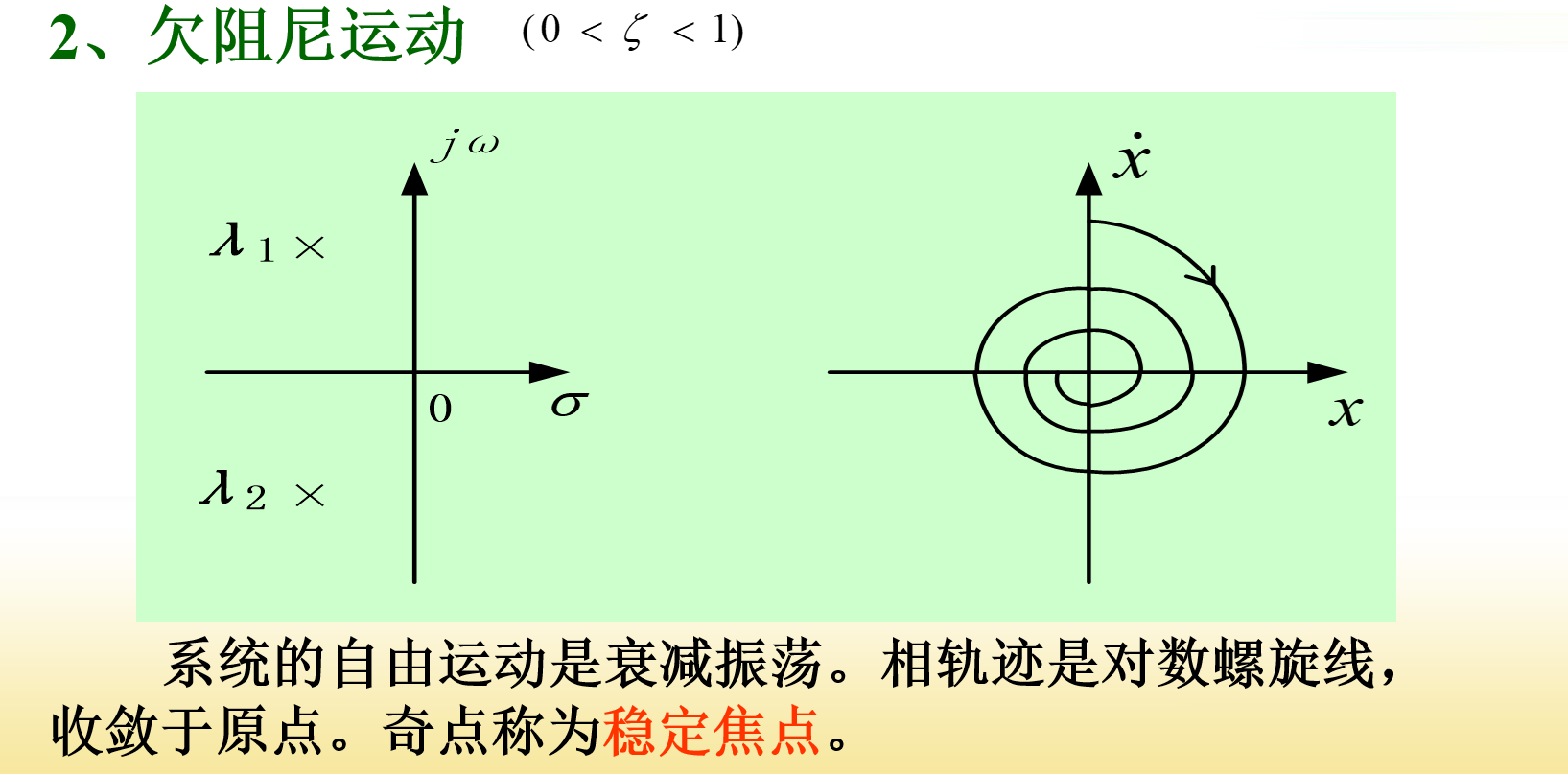
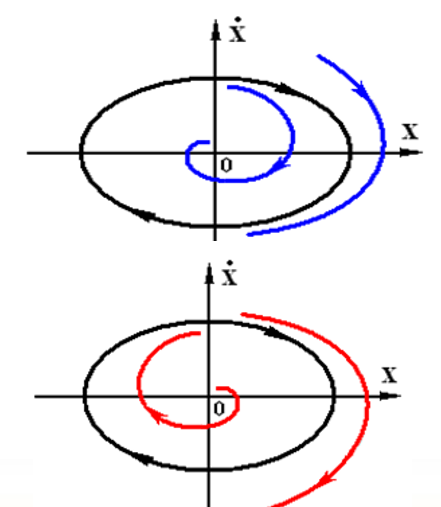
- 稳定交点-欠阻尼运动、对数螺旋线
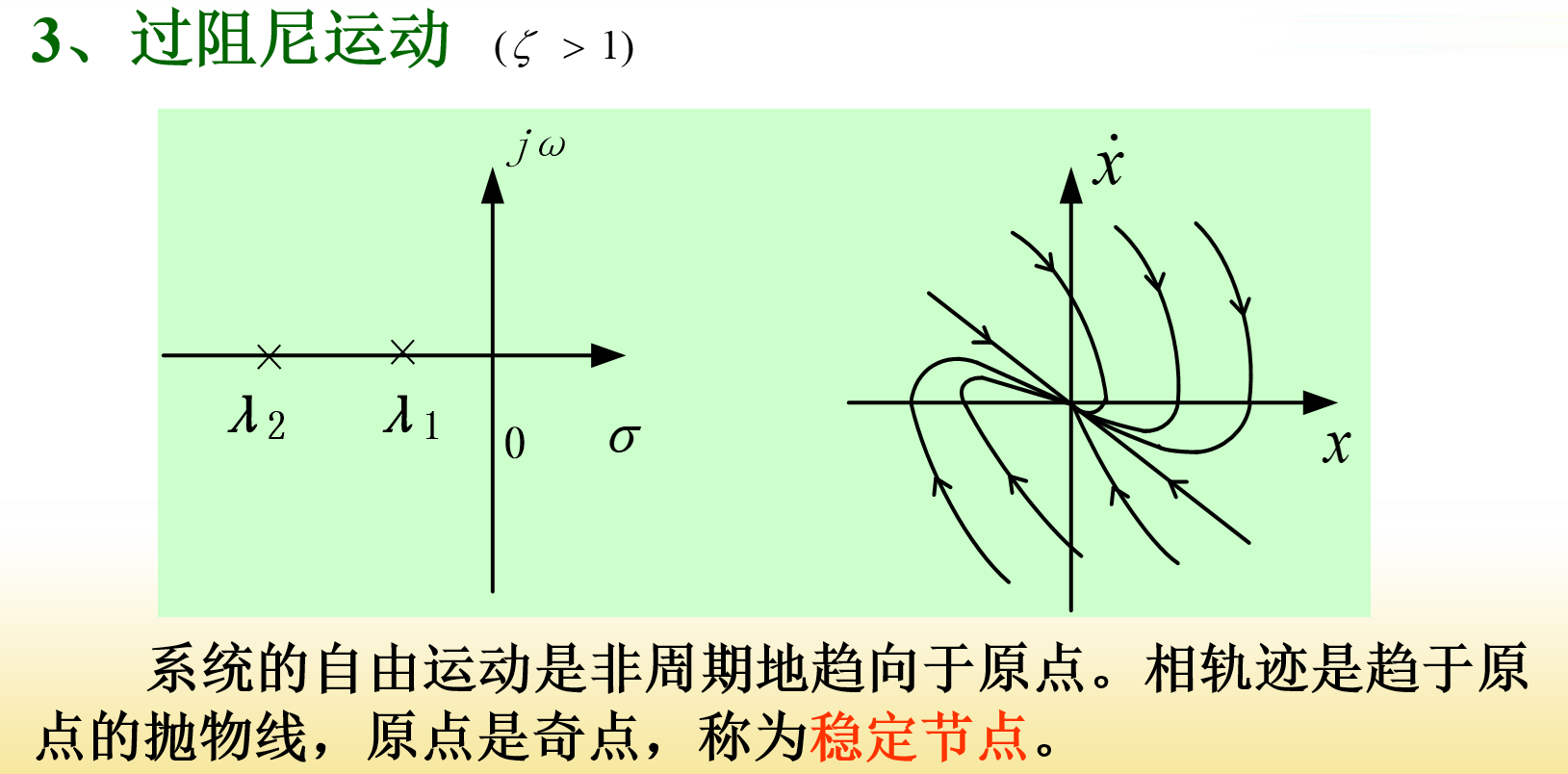
- 稳定节点-过阻尼运动、抛物线
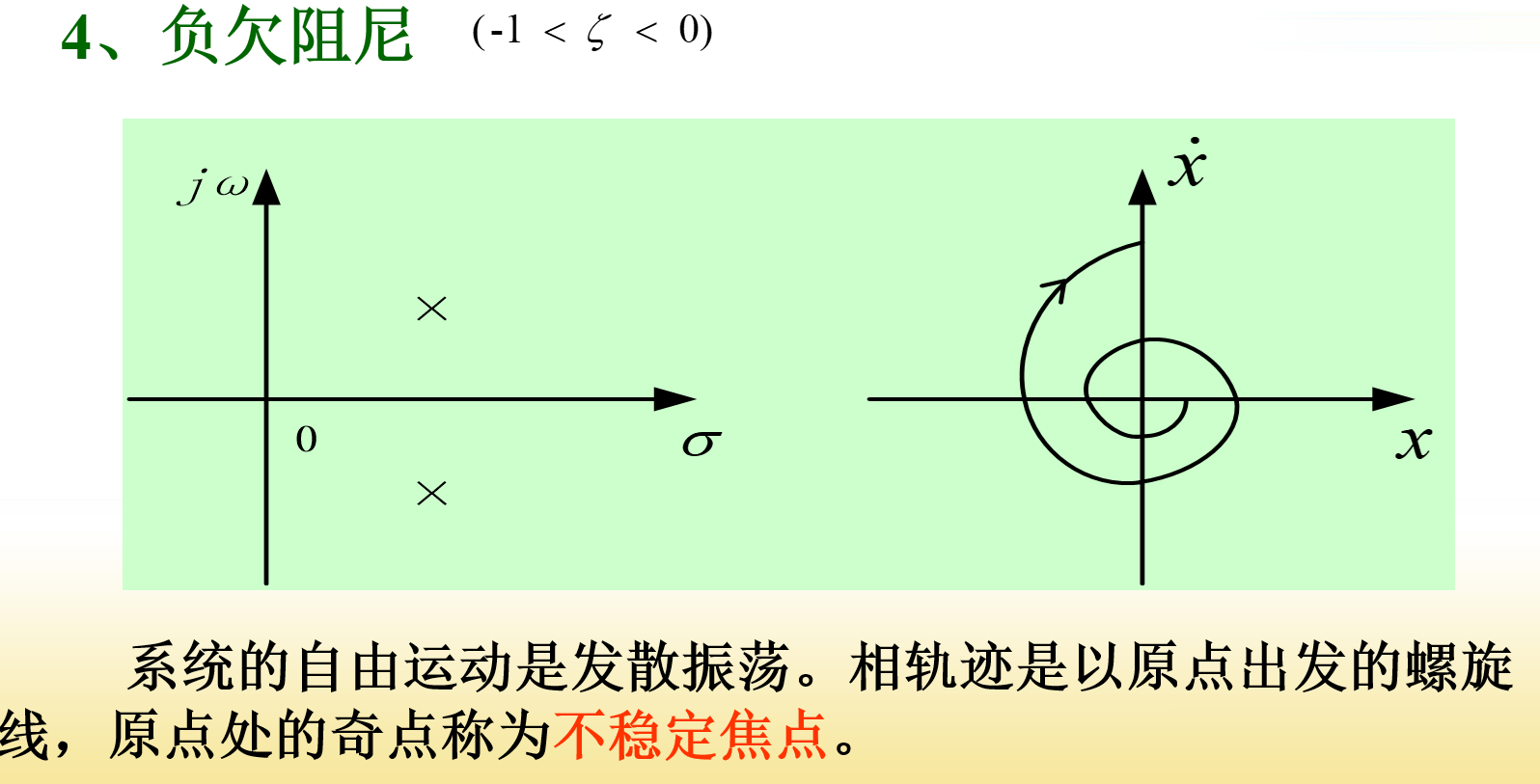
- 不稳定焦点-负欠阻尼运动、螺旋线
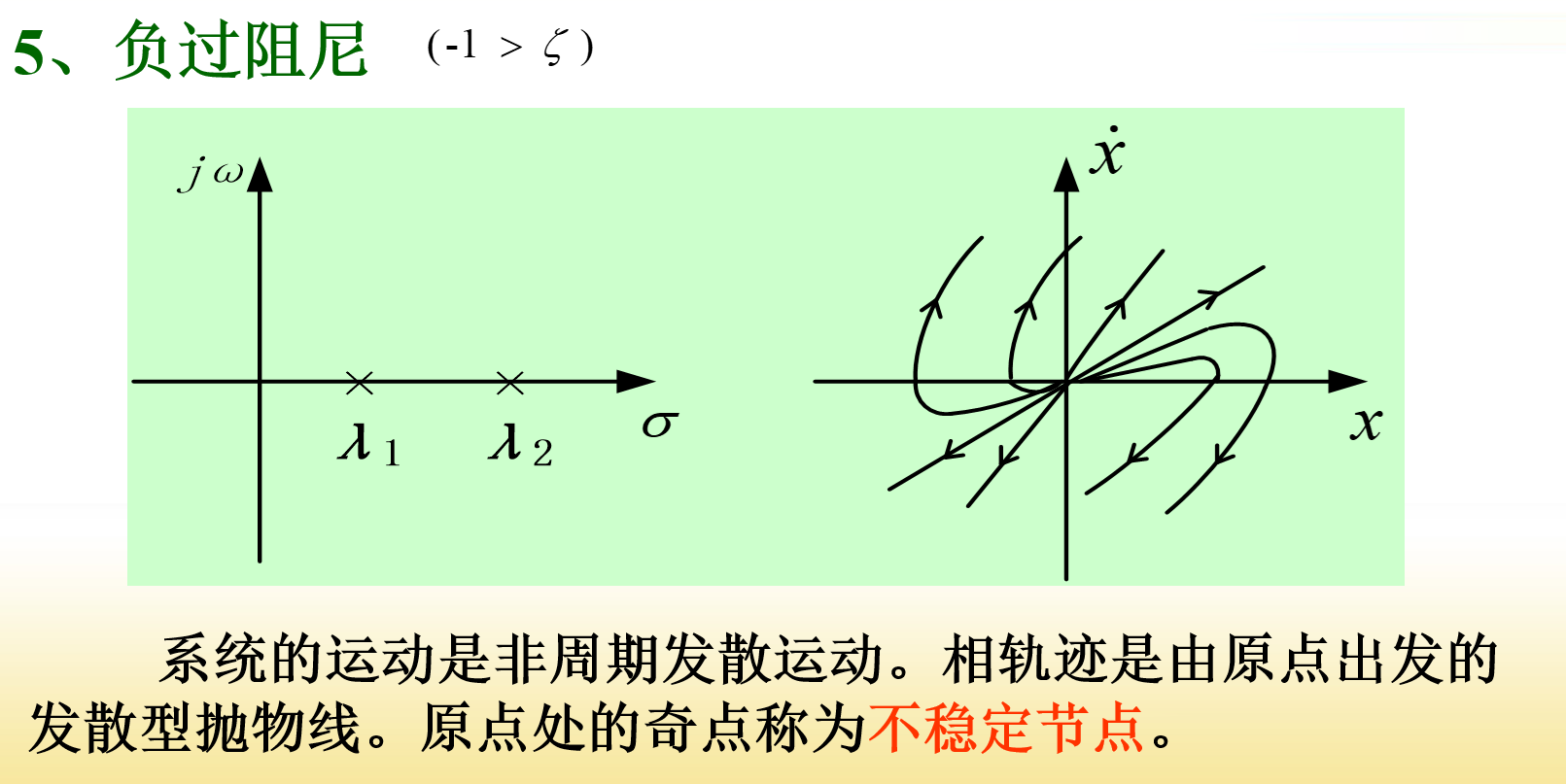
- 不稳定节点-负过阻尼运动、抛物线
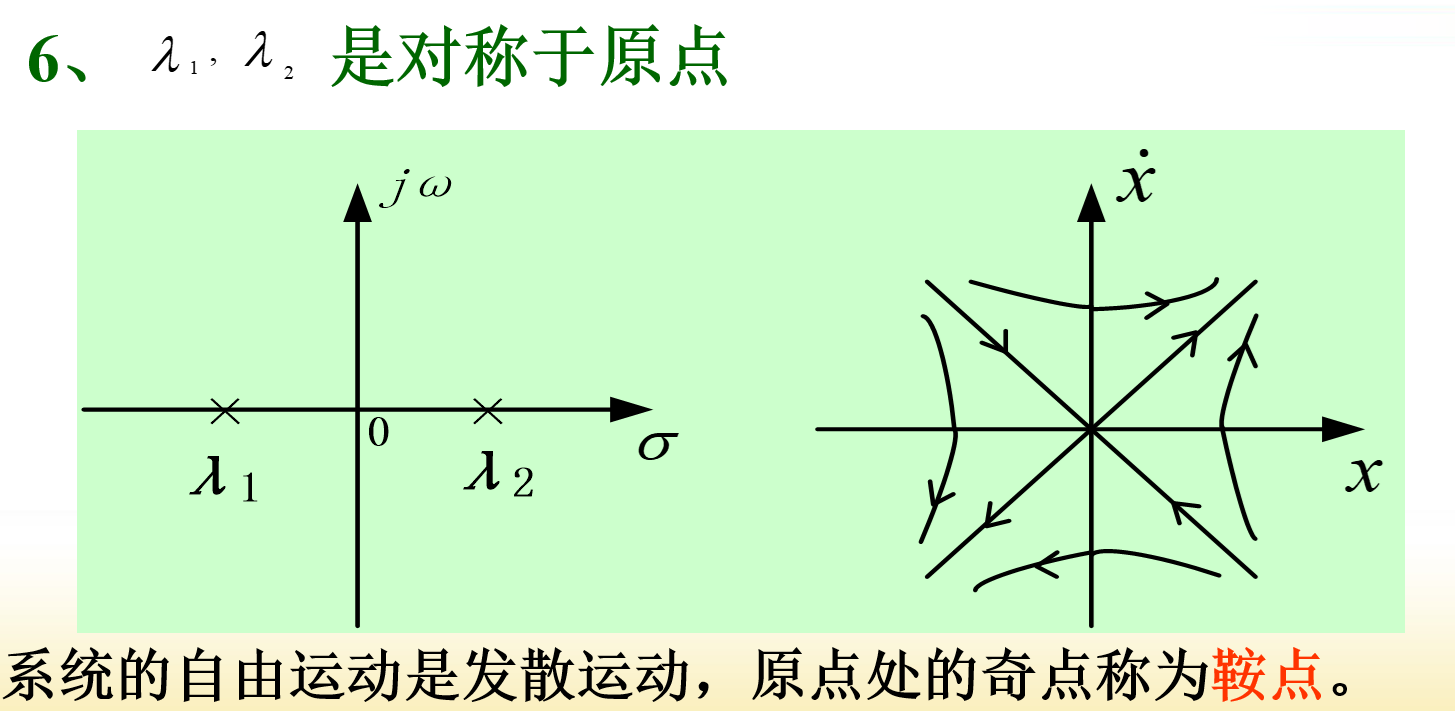
- 鞍点-发散运动
¶ 线性化处理
¶ 极限环分析
存在一条封闭的曲线---称为极限环(或奇线)
极限环分为稳定的、不稳定的和半稳定三种
极限环是控制系统不希望出现的情况,非线性系统分析的重要内容就是要分析极限环产生的条件,并寻找出消除极限环的方法。
¶ 稳定
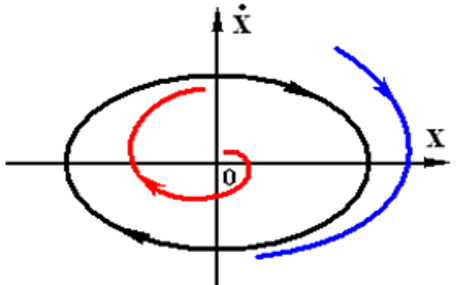
环内的相轨迹发散至极限环,环内是不稳定区;环外相轨迹收敛至极限环,环外是稳定区域。
¶ 不稳定
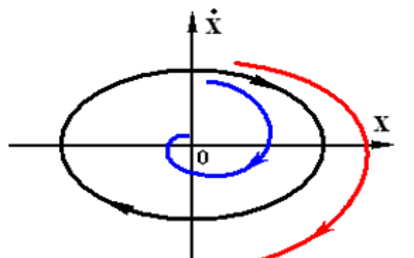
环内相轨迹收敛至环内的奇点,环内是稳定的区域;环外相轨迹发散至无穷远处,环外是不稳定区域
¶ 半稳定
两种情况。
内、外都是稳定区,极限环表示的周期运动是稳定的,系统的运动将收敛至环内的奇点。
内、外都是不稳定区域,极限环表示的周期运动是不稳定的,系统的运动最终发散至无穷处。
¶ 相轨迹绘制
绘制方法:
- 解析法
- 适用于较简单的系统,找出的关系,绘出相平面图
- 参变量法
解微分方程,得到,消去t,得到二者关系式 - 变量分离直接积分法
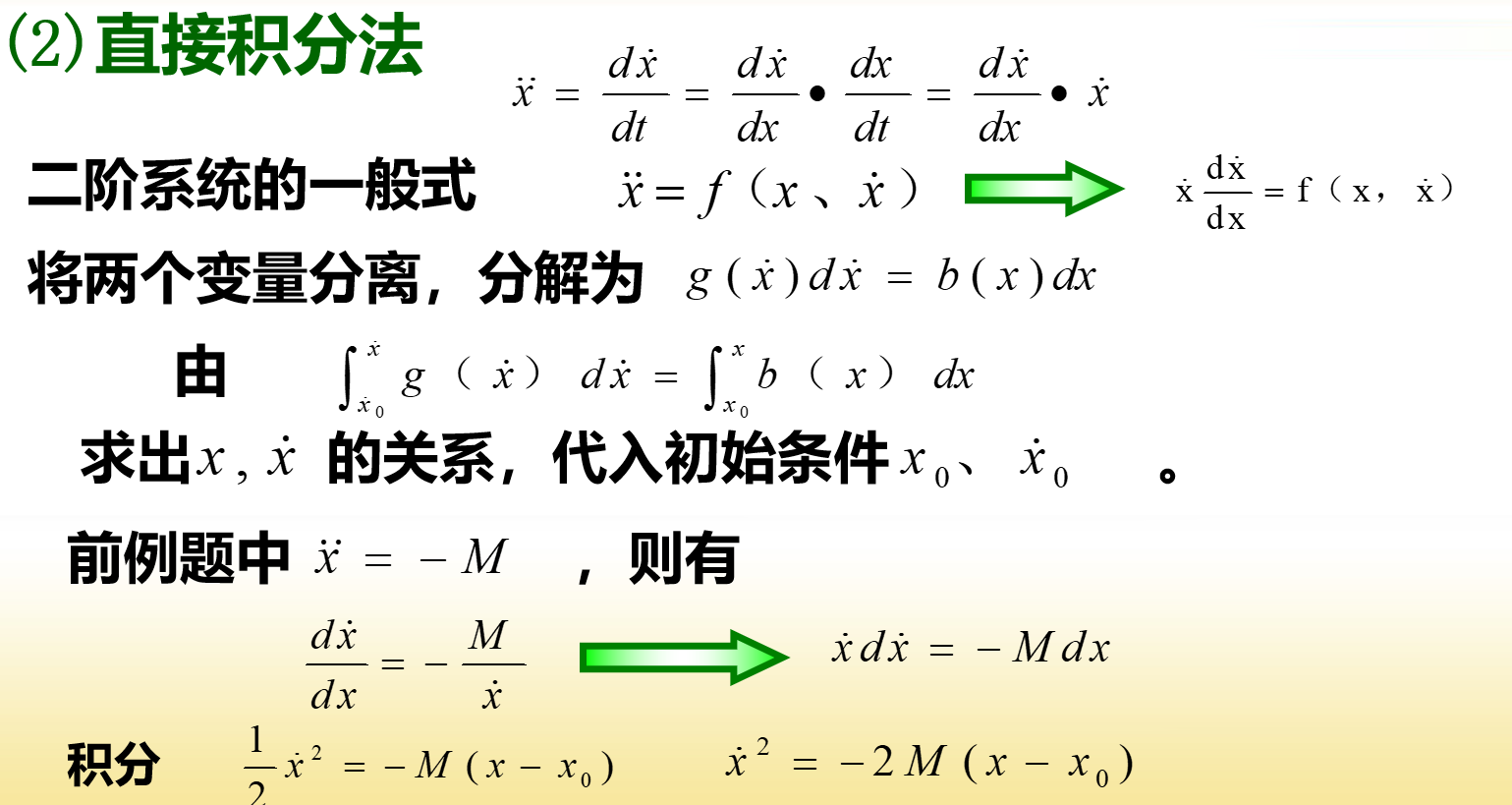
- 参变量法
- 适用于较简单的系统,找出的关系,绘出相平面图
- 等倾斜线法
- 太难用
- δ法
¶ 求暂态响应
从相轨迹上看暂态响应时间是从一个状态点 XA移动到另一状态点XB所需的时间
看不懂应该不考
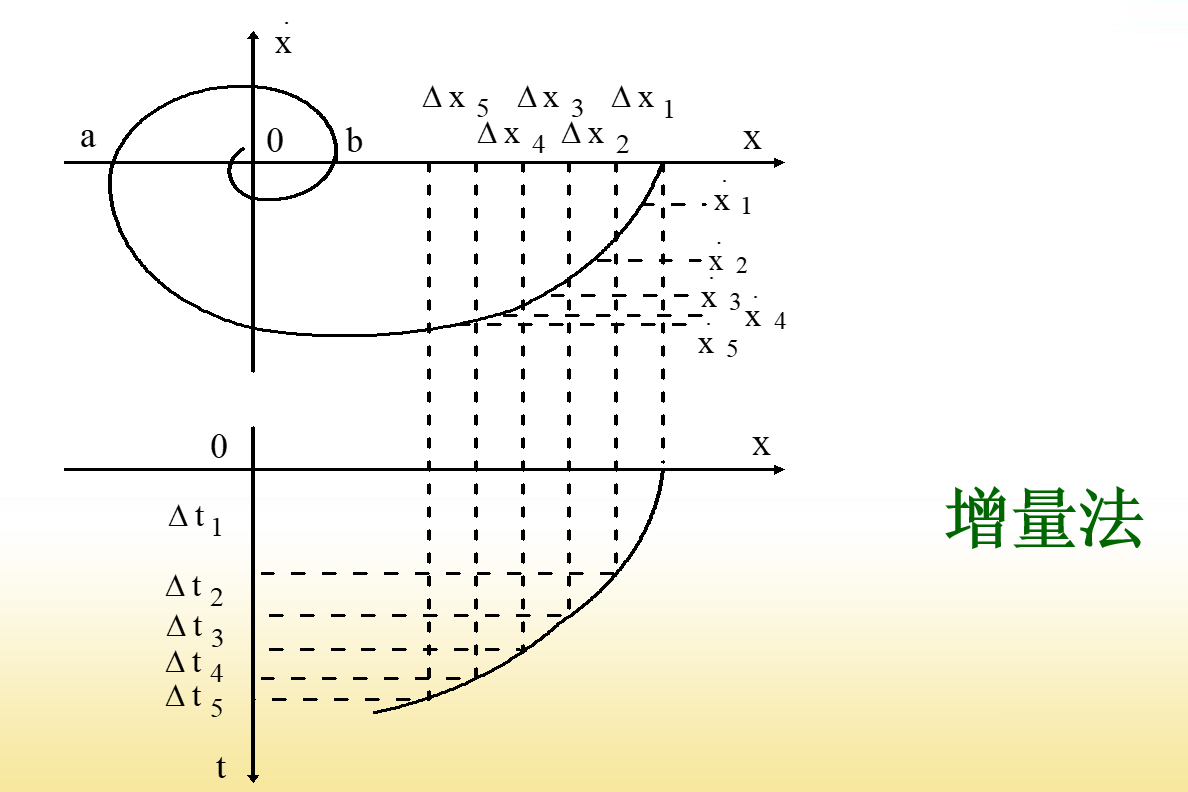
¶ 增量法
实际步骤:
- 取点分段
- 计算平均速度
- 计算时间增量
¶ 圆弧法
t_{AB}=t_B-t_A=\int_{x_A}^{x_B}\frac{dx_1}{x_2}=\int_{x_A}^{x_B}\frac{1}{\dot{x}_1}dx_1=\int_{x_A}^{x_B}\frac{1}{\dot{x}}dx$$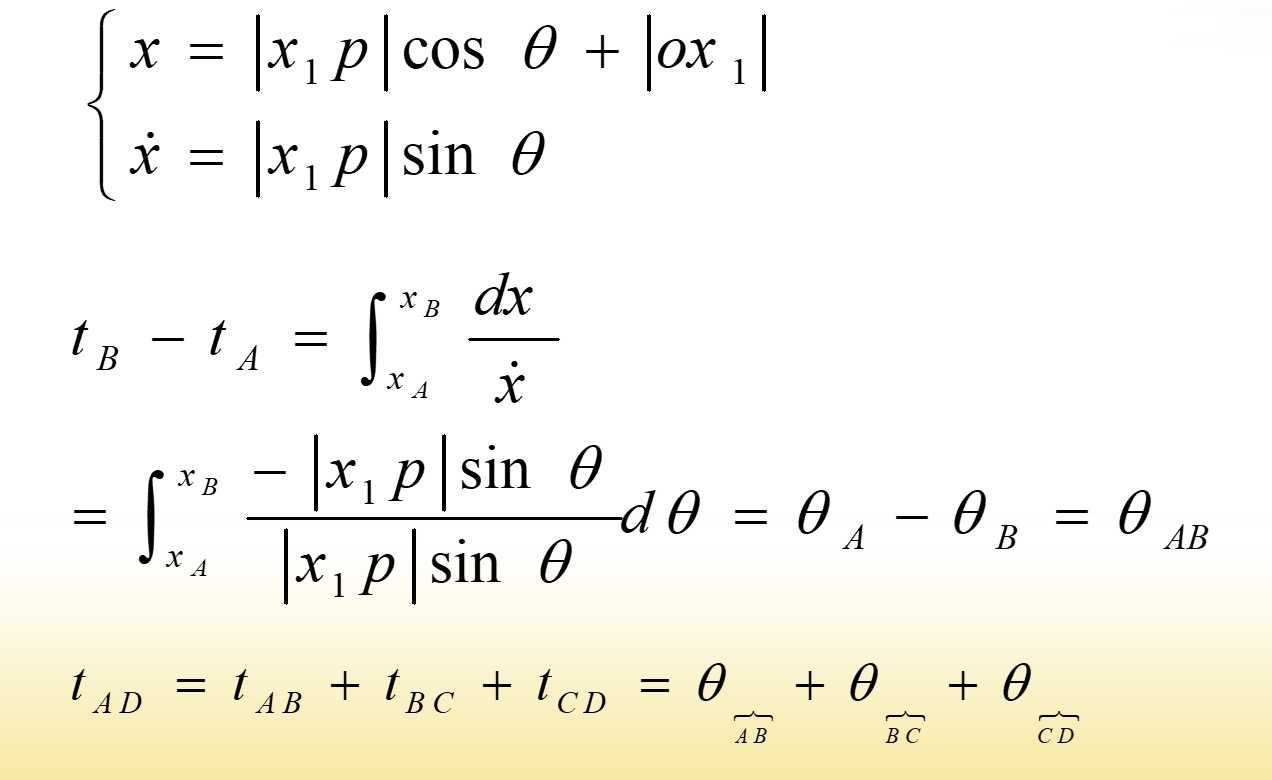 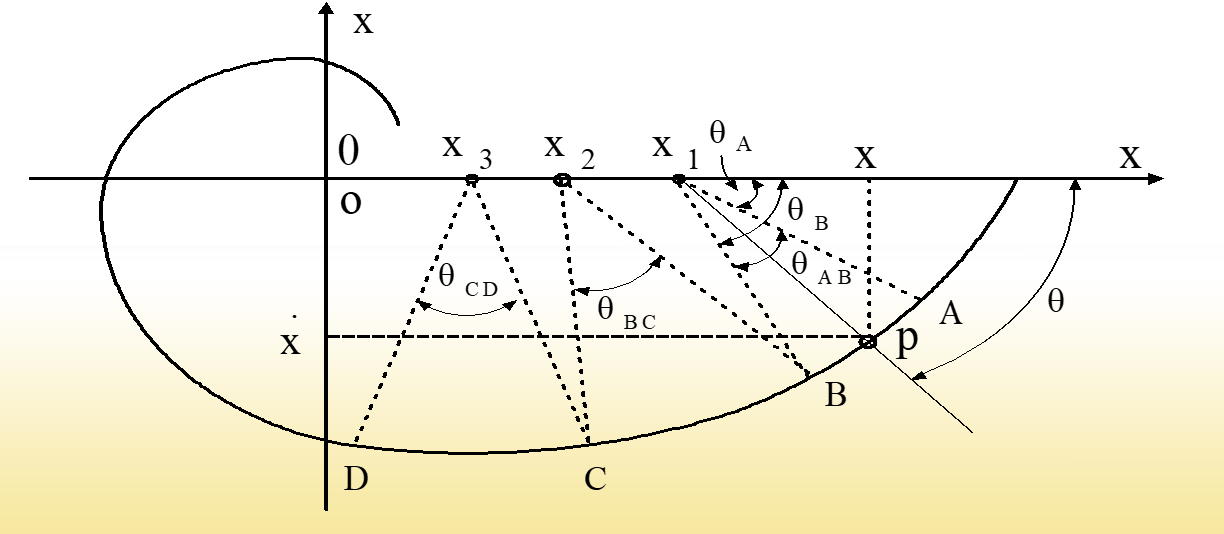 ## 描述函数 [参考视频](https://www.bilibili.com/video/BV19tp2zFExC) 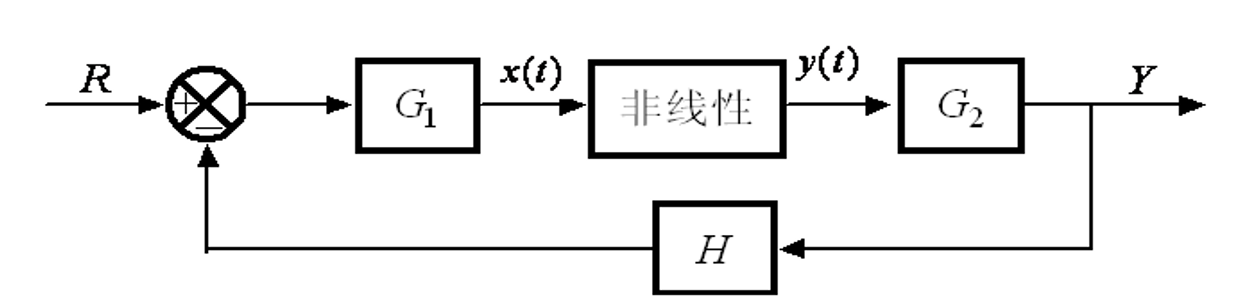 对于包含非线性环节和线性环节的系统,设输入x(t)=Asinωt,将输出y进行傅里叶展开,Y1为基波幅值,则定义**描述函数**:$$\mathrm{N}\left(\mathrm{A}\right)=\frac{\mathrm{Y}_1}{\mathrm{A}}\angle\phi_1描述函数 N(A)为输入幅值A的函数,而与频率无关。
当非线性环节为单值非线性时,相应的描述函数为一实数,表示输入与输出是同相位的
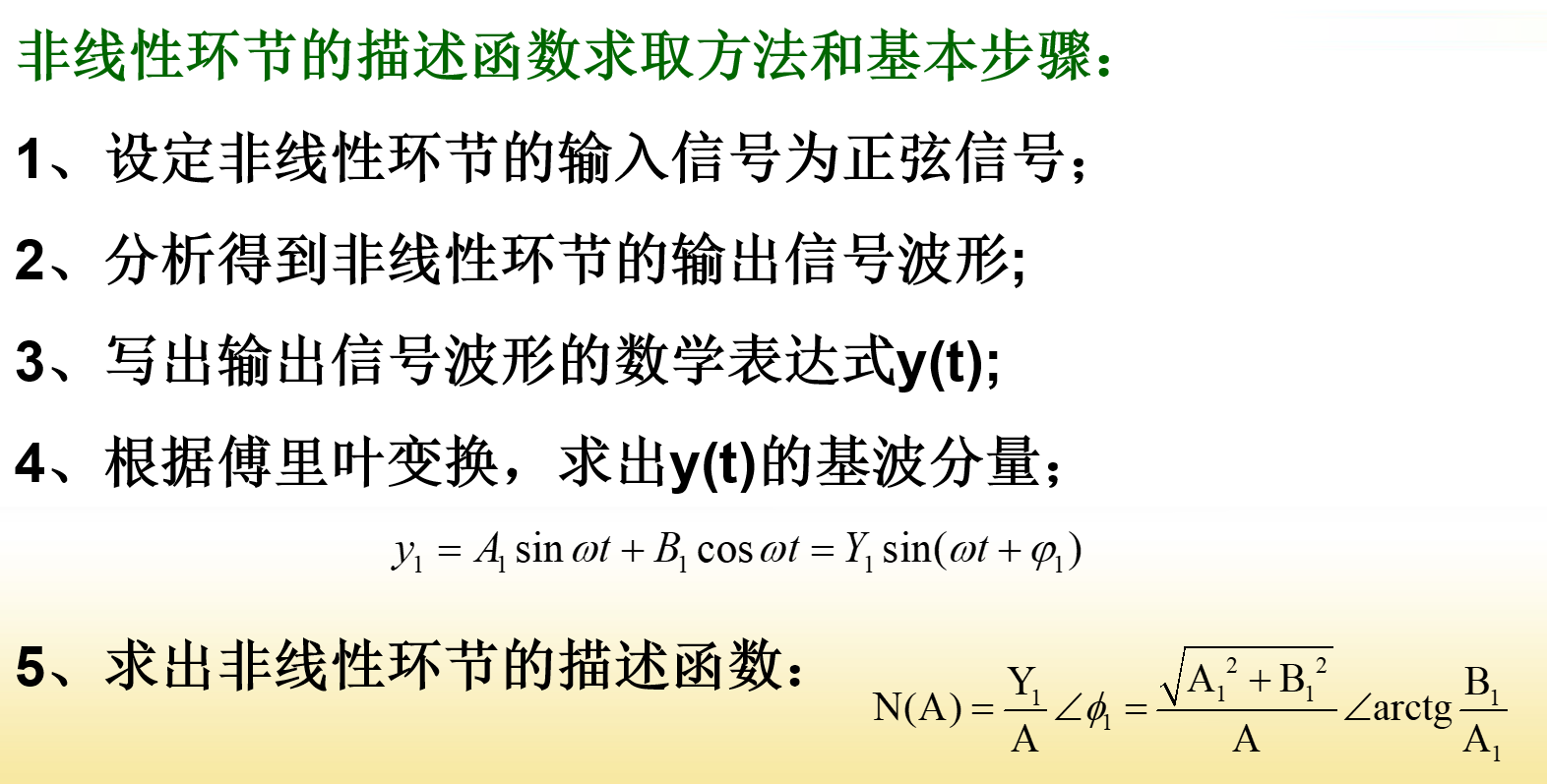
步骤看看得了
¶ 典型环节的描述函数
¶ 理想继电器
\mathrm{N}\left(\mathrm{A}\right)=\frac{4\mathrm{~M}}{\pi\mathrm{~A}}$$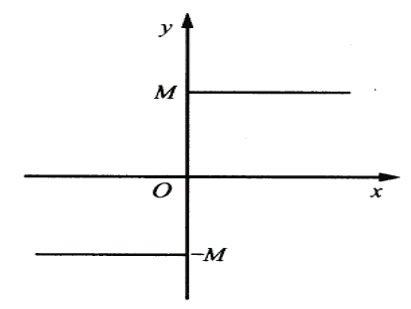 #### 饱和特性 $$N\left(A\right)=\frac{2K_0}{\pi}[\frac{\pi}{2}-\arcsin\quad\frac{a}{A}-\frac{a}{A}\sqrt{1-(\frac{a}{A})^2}]¶ 死区继电器
¶ 滞环继电器
¶ 谐波平衡分析法
非线性部分用N(A)表示,线性部分用传递函数G(jω)表示: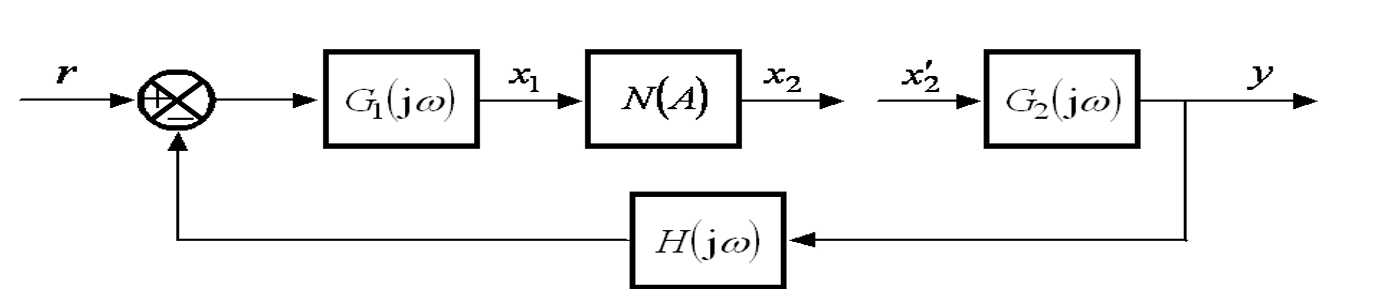
自持振荡只与非线性系统的结构和参数有关,分析自持振荡时,因此,可假设输入信号为零,即:r=0
系统产生自持振荡的条件是$$G\left(j\omega\right)N\left(A\right)=-1\quad\longrightarrow\quad G\left(j\omega\right)=-\frac{1}{N\left(A\right)}$$
线性系统为最小相位系统时的非线性系统的乃氏判据:
如非线性部分的负倒特性没有被线性部分的乃氏曲线包围,则系统是稳定的。反之,如果非线性部分的负倒特性被线性部分的乃氏曲线包围,则系统为不稳定的。
若两曲线相角,则可能产生自持震荡。
¶ 自持震荡稳定性分析
负倒特性曲线从不稳定区域到稳定区域->交点为稳定自振交点
负倒特性曲线从稳定区域到不稳定区域->交点为不稳定自振交点
¶ 典型环节的负倒特性
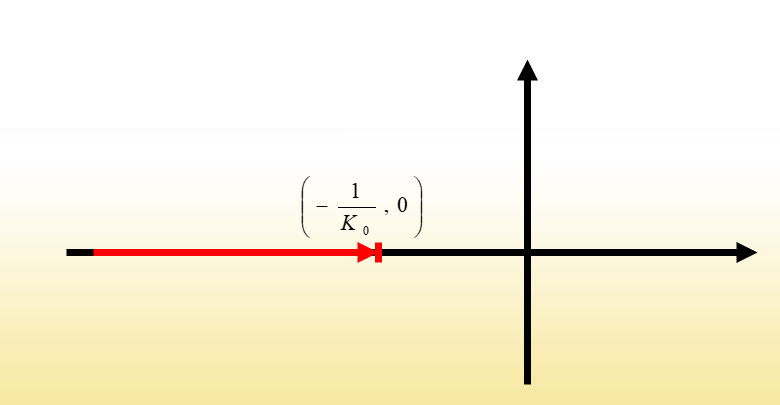
¶ 饱和特性
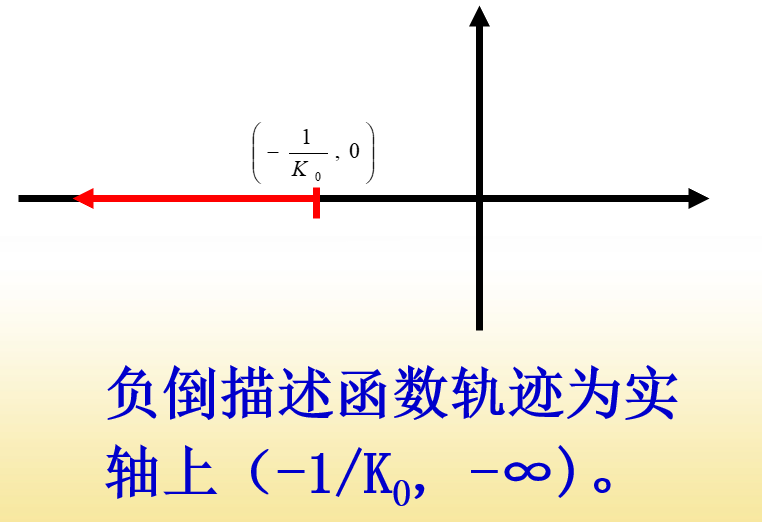
¶ 死区特性
¶ 滞环继电器特性
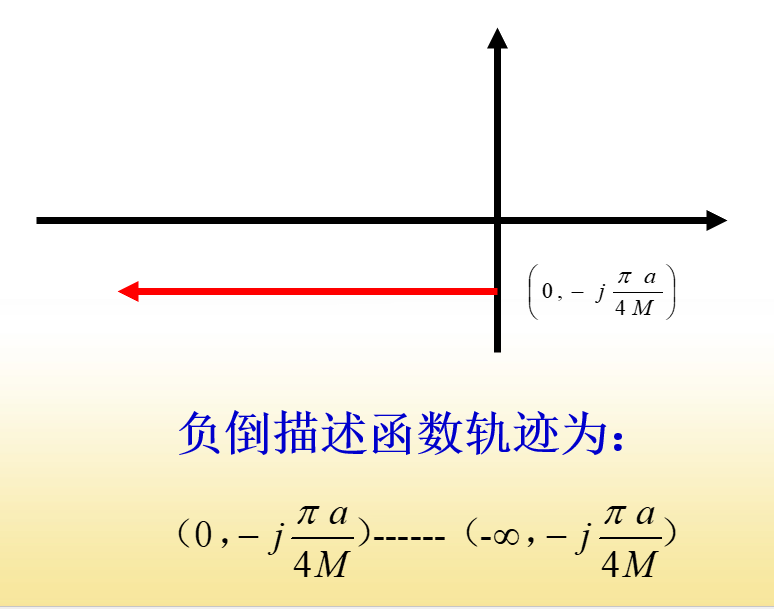
¶ 死区继电器
\begin{aligned}N\left(A\right)&=\frac{4M}{\pi A}\sqrt{1-\left(\frac{a}{A}\right)^{2}}&A\geq a\end{aligned}$$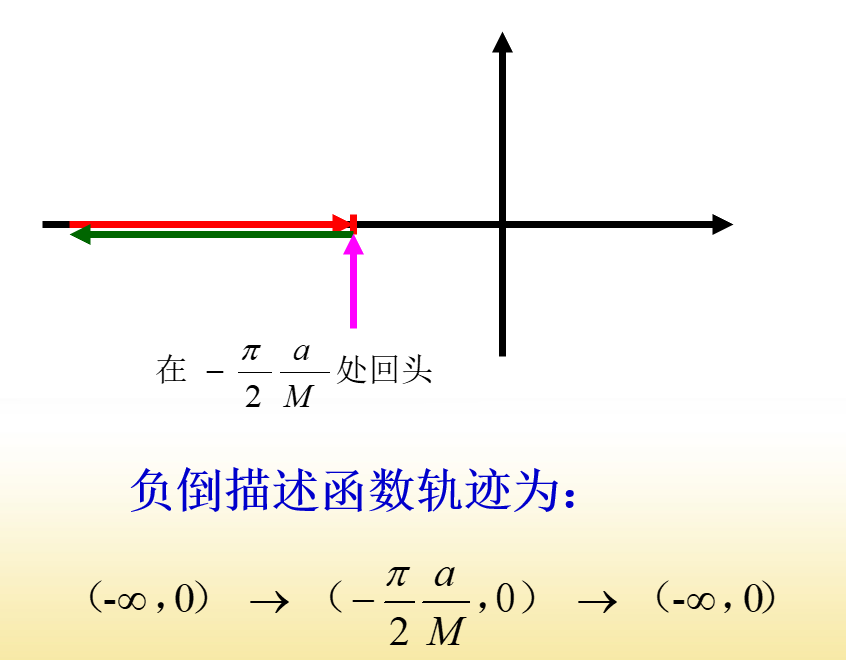 ## 非线性分析题目 步骤: - 负倒描述函数特性,绘制 - 分析线性部分的幅相频率特性,绘制 - 如果存在稳定自振交点则求出自持振荡频率和振幅 - 一般负倒特性是实数,令G的虚数部分=0求解 ## 非线性环节的串并联 ### 非线性环节的串联 死区参数$$a=2a_1+2a_{2}/2K_1$$饱和值b 线性部分斜率$$K=2K_1K_2重点:
非线性系统,饱和、死区、间隙、继电器、非线性增益、滞环含义,非线性系统三种工作状态,非线性系统三种分析方法,相平面定义,稳定焦点、稳定节点、中心点、鞍点对应图形
极限环含义,稳定、不稳定、半稳定极限环含义,等倾斜线方程,描述函数含义,理想继电器描述函数,死区继电器描述函数,谐波平衡分析法自振荡条件,自振荡幅值和相角计算
稳定和不稳定自振分析,继电器理想和死区情况下的负倒描述函数曲线,非线性系统的标准框图